


本期我们来着重学习安川机器人干涉区的定义及其相关设置方法。重点难点已经全部梳理好,一期搞定,记得一键收藏呀!
本期要点
认识干涉区
立方体干涉区
轴干涉区
清除干涉区数据

干涉区是指:防止多台机器人之间或机器人与周边设备之间发生干涉的功能。
干涉区***多可设定64个,安川机器人常用设定种类有以下3种:
>> 立方体干涉
>> 立方体外干涉
>> 轴干涉

立方体干涉区,是指与底座坐标、机器人坐标、用户坐标中任一坐标轴平行的长方体。
以YRC1000控制柜为例,控制柜判断机器人控制点的当前值,是在此立方体干涉区内还是干涉区外,并将判断结果以信号输出。专用输出信号为#50080~#50157。详见下图:

立方体干涉区的种类
立方体干涉区的应用,有“立方体干涉” 和“立方体外干涉” 两种。
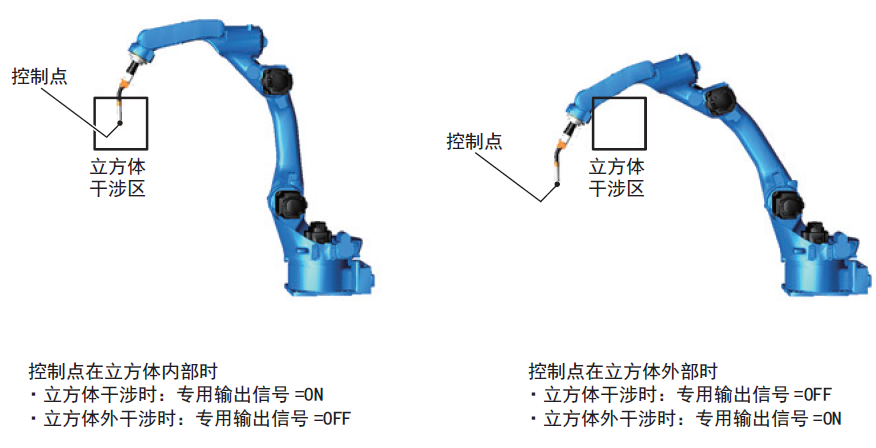
1)立方体干涉:
立方体干涉的定义是指:设定立方体内部作为干涉区。机器人控制点的当前值在立方体内部时,会接通对应的专用输出信号。
2)立方体外干涉:
立方体外干涉的定义是指:设定立方体外部作为干涉区。机器人控制点的当前值在立方体外部时,会接通对应的专用输出信号。
1)立方体干涉:
立方体干涉的定义是指:设定立方体内部作为干涉区。机器人控制点的当前值在立方体内部时,会接通对应的专用输出信号。
2)立方体外干涉:
立方体外干涉的定义是指:设定立方体外部作为干涉区。机器人控制点的当前值在立方体外部时,会接通对应的专用输出信号。
新建立方体干涉区,主要有以下3种方法:

本文摘自网络
- 下一篇:安川机器人基础操作培训2
- 上一篇:安川机器人全新综合目录正式发布
